Шаговый двигатель подключение к arduino

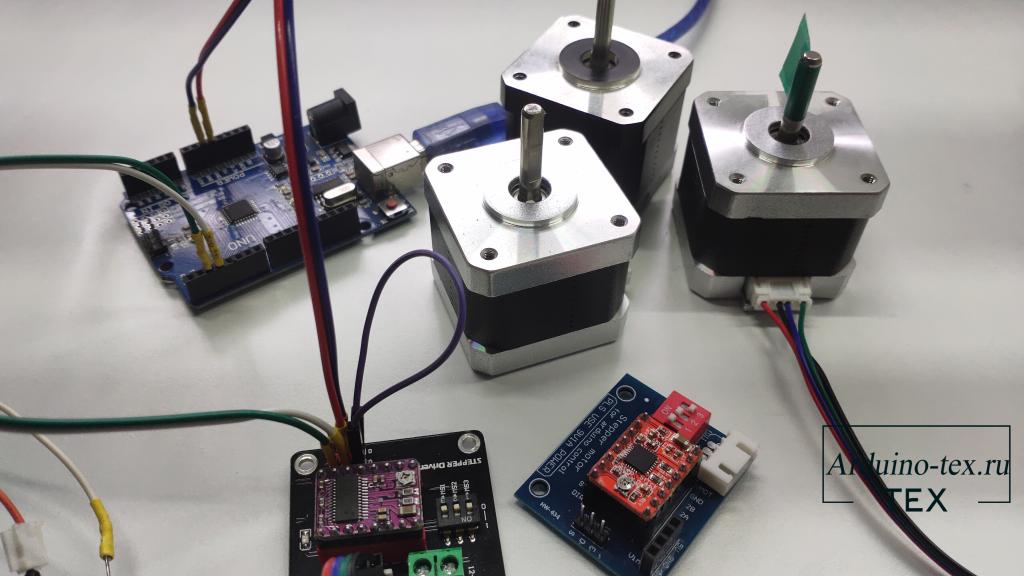
Управление шаговым двигателем NEMA17 с помощью Arduino
Шаговые двигатели представляют собой электромеханические устройства, задачей которых является преобразование электрических импульсов в перемещение вала двигателя на определенный угол. Достоинствами шаговых двигателей по сравнению с простыми являются:. Шаговые двигатели применяются там, где требуется высокая точность перемещений.
с использованием библиотеки AccelStepper.")
")







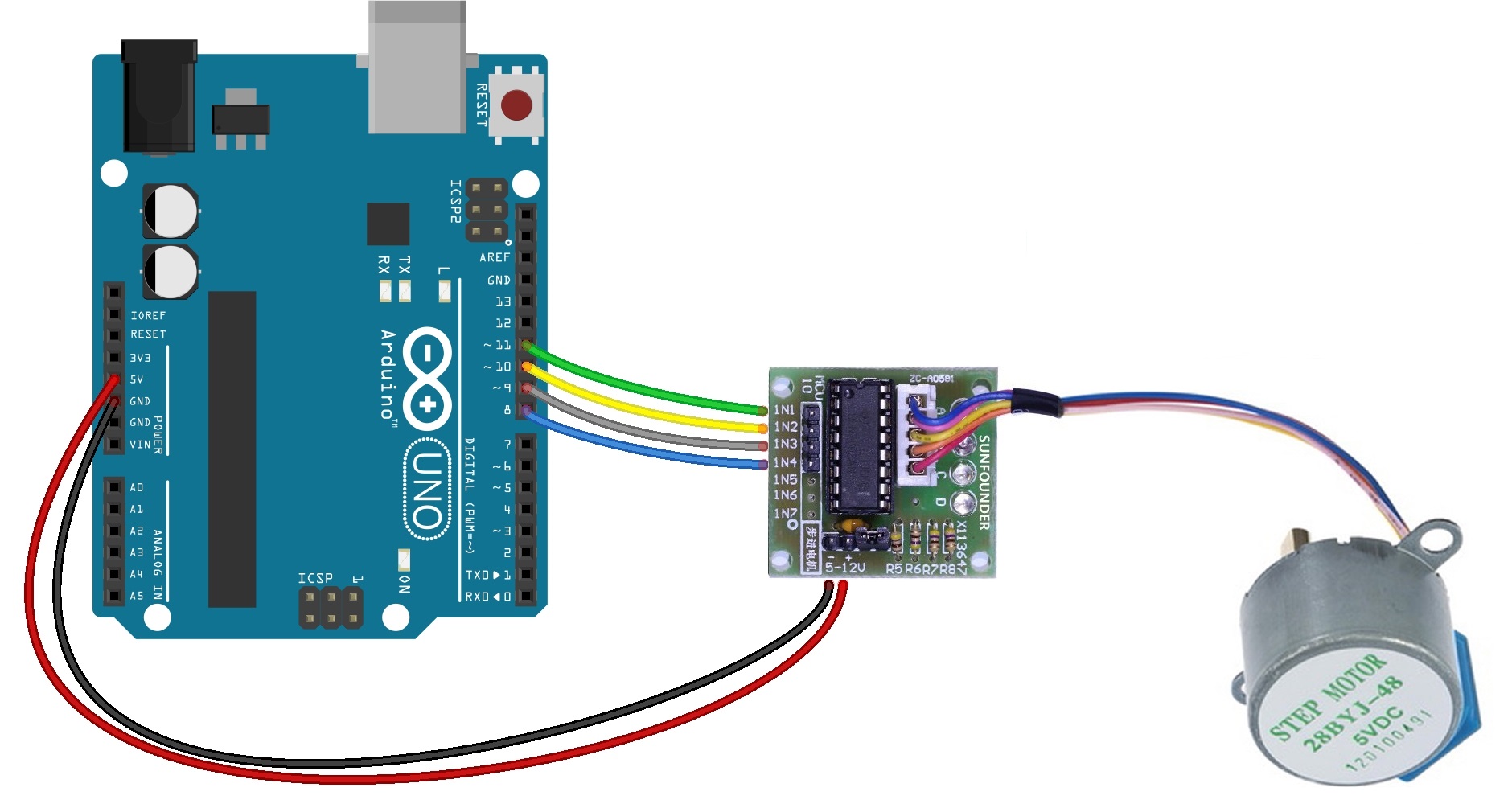
Шаговые двигатели применяют в механических системах точного позиционирования — ЧПУ станках, 3d-принтерах. Шаговые двигатели применяют в механических системах точного позиционирования — ЧПУ станках, 3d-принтерах, принтерах, роботах-манипуляторах. Шаговые двигатели преобразуют электрические импульсы в перемещение вала на определенный угол. Минимально возможный угол перемещения шагового двигателя, называется шагом. В любительской робототехнике очень часто используют бюджетный шаговый двигатель 28BYJ, в комплекте с которым продается драйвер двигателя на микросхеме ULN, необходимый для подключения шагового двигателя к плате Arduino.




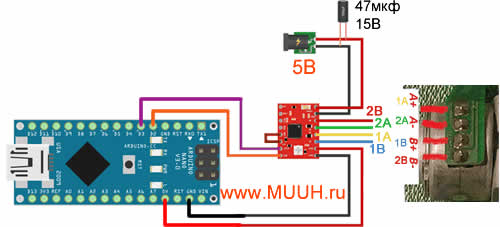
![Пример Шаговый двигатель и драйвер ULN [База знаний]](http://muuh.ru/images/stepper-motors/stepper28BYJ48-driverULN2003-2knopki-vlevo-vpravo.fw.png)



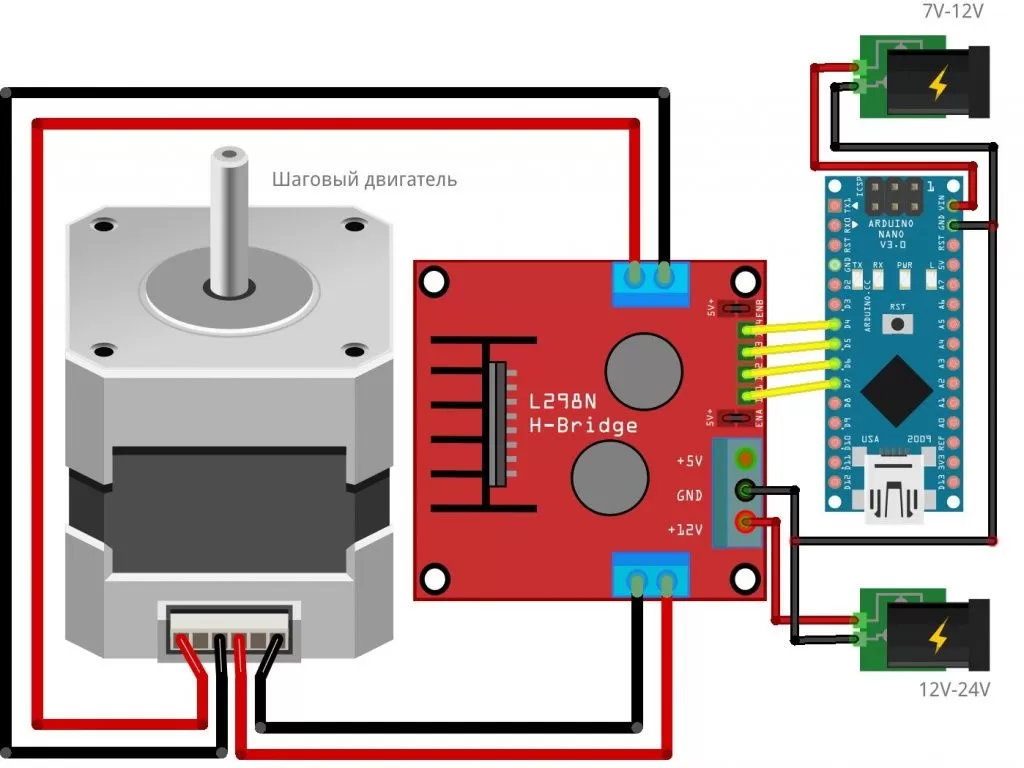
Она была созданна конкретно для этого шагового двигателя 28BYJV и учитывающая все его индивидуальные параметры. Драйвер управляется через четыре управляющих входа обозначенные как IN1, IN2, IN3, IN4 , именно к ним необходимо подключить соответственно выходы Pin с номерами 8 Pin, 9 Pin, 10 Pin и 11 Pin на плате контроллера Ардуино как это показано на изображении ниже. Для загрузки скетча необходимо в среде разработки Ардуино IDE нажать вкладку новый проект и в открывшиеся окошко поместить скетч приведенный ниже:.